8. Odziv linearnih sistemov na naključno vzbujanje#
Vrnimo se k linearnemu sistemu z eno prostostno stopnjo (glejte poglavje Lastnosti linearnega časovno invariantnega sistema):
Odziv na deterministično vzbujanje izračunamo s pomočjo konvolucije:
kjer je \(h(t)\) impulzna prenosna funkcija, ki definira linearni sistem.
Srednja vrednost odziva#
V nadaljevanju bomo predpostavili, da je vzbujanje \(f(t)\) naključno. Izračunajmo najprej pričakovano srednjo vrednost odziva. Uporabiti moramo operator pričakovanja \(E[]\):
ker je naključna vrednost samo pri vzbujanju \(f(t)\), sledi:
Sklenemo lahko:
Opomba
če opazujemo proces, ki ima na vhodu/vzbujanju srednjo vrednost enako nič, bo tudi srednja vrednost odziva enaka nič (ne glede na impulzno prenosno funkcijo):
Avtokorelacijska funkcija#
Tukaj želimo odgovoriti na vprašanje, kako je avtokorelacijska funkcija vzbujanja \(R_{ff}(\tau)\) povezana z avtokorelacijsko funkcijo odziva \(R_{xx}(\tau)\); poglejmo detajle:
Nadaljujemo z izpeljavo: ker je \(h(t)\) enolično determinirana, velja \(h(t)=E[h(t)]\):
Uporabimo zamenjavo \(t_1=t-\tau_1\), iz česar sledi \(E\Big[f(t-\tau_1)\,f(t+\tau-\tau_2)\Big]=E\Big[f(t_1)\,f(t_1+\tau_1+\tau-\tau_2)\Big]=R_{ff}(\tau+\tau_1-\tau_2)\) in nato:
Naredimo sedaj prehod v frekvenčno domeno:
Opomba: v zgornjem izrazu smo uporabili zamenjavo: \(u=\tau+\tau_1-\tau_2\) in posledično \(\mathrm{e}^{-\textrm{i}\,2\pi\,f\,\tau}=\mathrm{e}^{-\textrm{i}\,2\pi\,f\,(u-\tau_1+\tau_2)}\) ter nato ločili integracijske spremenljivke.
Končni rezultat je:
Opomba
avtospektralna gostota moči na odzivni strani je definirana kot:
kjer \({}^*\) označuje kompleksno konjugirano vrednost.
Križnokorelacijska funkcija#
Poglejmo si sedaj še križnokorelacijsko funkcijo \(R_{fx}(\tau)\) vzbujanja \(f(t)\) in odziva \(x(t)\):
Naredimo sedaj prehod v frekvenčno domeno:
Opomba: v zgornjem izrazu smo uporabili zamenjavo: \(u=\tau-\tau_1\) in posledično \(\mathrm{e}^{-\textrm{i}\,2\pi\,f\,\tau}=\mathrm{e}^{-\textrm{i}\,2\pi\,f\,(u+\tau_1)}\) ter nato ločili integracijske spremenljivke. Končni rezultat je:
Opomba
križnospektralna gostota moči je definirana kot:
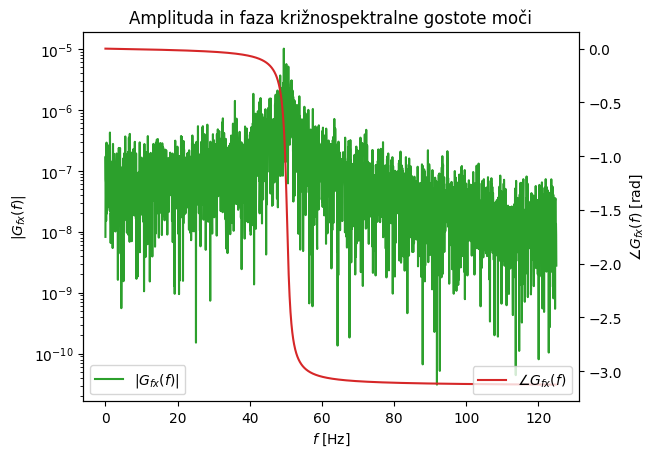
Za razliko od avtospektralne gostote križnospektralna gostota ohranja fazno informacijo!
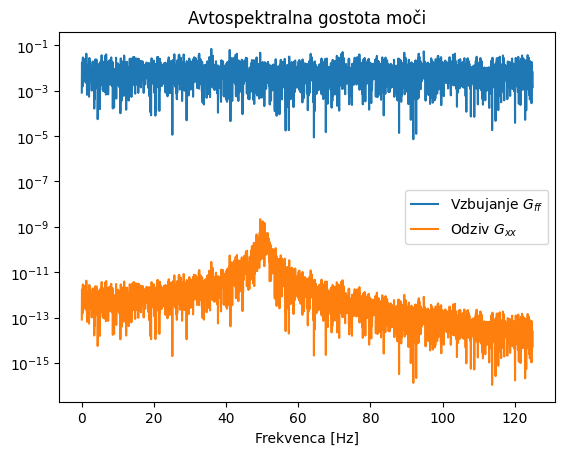
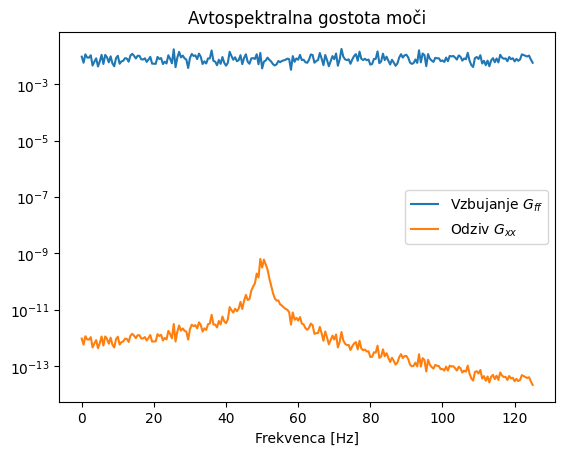
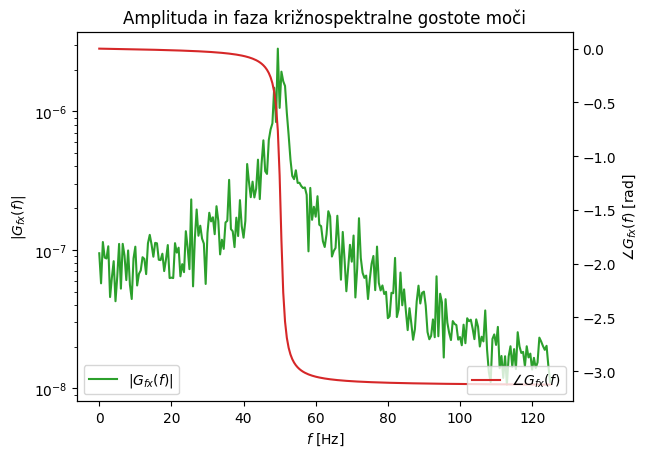
Zgled 1#
S pomočjo zgleda spodaj si bomo pogledali avto- in križnospektralno gostoto na naključno generiranih, normalno porazdeljenih podatkih.
Zgled 2#
Poglejmo si še, kako spektralno gostoto povprečimo in s tem zmanjšamo frekvenčno natančnost ter amplitudni raztros.
Koherenca#
Opomba
Koherenca je definirana kot:
in predstavlja merilo linearne povezanosti med vhodom (vzbujanjem \(f\)) in izhodom (odzivom \(x\)) sistema.
Ker velja:
se koherenca \(\gamma_{fx}^2(f)\) nahaja v območju od 0 do 1:
Če je koherenca 0, to pomeni, da vzbujanje in odziv nista povezana, če je koherenca 1, pa da sta vzbujanje in odziv linearno odvisna. Odstopanje od 1 se izmeri tudi takrat, ko imamo v meritvi šum, obravnavamo nelinearni sistem ali pa je odziv posledica (tudi) drugih vzbujanj in ne samo \(f(t)\).
Cenilke frekvenčne prenosne funkcije#
Frekvenčna prenosna funkcija (FRF) karakterizira dinamski sistem; različne oblike frekvenčne prenosne funkcije smo sicer teoretično že spoznali v poglavju Frekvenčna prenosna funkcija. Tukaj si bomo pogledali, kako FRF ocenimo na podlagi izmerjenih podatkov, pri tem pa se bomo omejili na sisteme z enim (sočasnim) vzbujanjem in enim (sočasnim) odzivom (to so tako imenovani sistemi SISO: ang. single input, single output).
Linearni časovno invariantni sistem SISO je mogoče predstaviti z blokovnim diagramom, kot smo to storili v sliki spodaj, kjer je \(f(t)\) vzbujevalna sila, \(h(t)\) impulzna prenosna funkcija in \(x(t)\) odziv; \(F(\omega)\), \(\alpha(\omega)\) in \(X(\omega)\) pa so njihovi pari v frekvenčni domeni.

FRF je za naključni proces definirana z \(\alpha(\omega)=S_{fx}(\omega)/S_{ff}(\omega)\), kjer sta \(S_{ff}(\omega)\) in \(S_{fx}(\omega)\) avto- in križnospektralna gostota moči.
Slika spodaj prikazuje sistem SISO, kjer sta \(u(t)\) in \(v(t)\) resnični vhod (vzbujanje) in resnični izhod (odziv) sistema. \(m(t)\) predstavlja izmerjeni šum na vhodu \(f(t)\) in \(n(t)\) izmerjeni šum na izhodu \(x(t)\). Velike črke so ustrezne količine frekvenčne domene.

Merilni šum je vedno prisoten in nam preprečuje, da bi izmerili dejanske vrednosti, ki vstopajo v sistem ali izstopajo iz njega. Slika kaže, da v resnici ni mogoče izmeriti dejanskega vhoda v sistem \(u(t)\), prav tako ni mogoče izmeriti dejanskega izhoda iz sistema \(v(t)\). Namesto tega merimo vhod s šumom:
in izhod s šumom:
Za poljubne korelacije med signaloma \(u(t)\) in \(v(t)\) ter šumom \(m(t)\) in \(n(t)\) lahko definiramo avto- in križnospektralno gostoto moči:
Vhod \(u(t)\) in izhod \(v(t)\) sistema sta povezana s pomočjo FRF:
V nadaljevanju bomo poskušali iz meritev s šumom (\(f(t)=u(t)+m(t)\) in \(x(t)=v(t)+n(t)\)) oceniti dejansko frekvenčno prenosno funkcijo.
Cenilka \(\hat{H}_1\)#
Pri merjenju vzbujanja \(f(t)\) in odziva \(x(t)\) slednji običajno pokriva večji dinamični razpon (v meritvi imamo relativno velike vrednosti in tudi relativno majhne) in je zato občutljivejši na merilni šum. Zaradi tega predpostavimo, da vhodnega šuma ni (\(m(t)=0\)); posledično velja:
in da izhodni šum \(n(t)\) ni koreliran s sistemom, torej velja:
Posledično se avto- in križnospektralne gostote poenostavijo:
Iz zadnje enačbe lahko na podlagi merjenih podatkov (\(x(t)\) in \(f(t)\)) ocenimo dejansko FRF: \(S_{fx}(\omega)= S_{uv}(\omega)\). S pomočjo povezave \(S_{uv}(\omega)=\alpha(\omega)\,S_{uu}(\omega)\) lahko FRF ocenimo kot:
Opomba
cenilka \(\hat{H}_1(\omega)\):
kjer smo uporabili simbol \(\hat{~}\) za označevanje ocene iz meritve. Pri tem je pomembno, da avto- \(\hat{S}_{ff}(\omega)\) in križnospektralno \(\hat{S}_{fx} (\omega)\) gostoto moči dobimo s povprečenjem naključnega procesa (glejte zgled spodaj).
Za oceno kvalitete in linearnosti meritve potrebujemo še koherenco:
kar kaže, da šum na izhodu \(S_{nn}(\omega)\) zmanjša koherenco in s tem kakovost ocenjenega FRF.
Če vzbujevalnega šuma \(m(t)\) ni mogoče zanemariti, potem velja \(S_{ff}(\omega)=S_{uu}(\omega)+S_{mm}(\omega)\) in:
Sledi, da cenilka \(\hat{H}_1\) zaradi šuma na vhodu podceni pravi FRF \(\alpha(\omega)=S_{uv}(\omega)/S_{uu}(\omega)\).
Cenilka \(\hat{H}_2\)#
Tukaj raziskujemo oceno FRF, ko šuma meritve na strani vzbujanja ni mogoče zanemariti, vendar ta ni koreliran s sistemom. Nadalje predpostavimo, da je mogoče zanemariti šum na strani odziva (\(n(t)=0\)); posledično velja:
Uporabimo:
kjer smo v zadnji vrstici uporabili \(S_{xf}(\omega)=S_{vu}(\omega)=\alpha(\omega)^*\,S_{uu}(\omega)\).
Posledično smo izpeljali cenilko za oceno FRF:
Opomba
cenilka \(\hat{H}_2(\omega)\):
Funkcija koherence postane:
kar kaže, da tudi šum na strani vzbujanja zmanjša koherenco in s tem kakovost ocenjenega FRF.
Opazimo lahko, da če cenilko \(\hat{H}_1\) delimo s cenilko \(\hat{H}_2\), dobimo cenilko koherence:
Če šuma na strani odziva \(n(t)\) ni mogoče zanemariti, potem velja \(S_{xx}(\omega)=S_{vv}(\omega)+S_{nn}(\omega)\) in:
V primeru šuma na odzivu cenilka \(\hat{H}_2(\omega)\) torej preceni pravi FRF \(\alpha(\omega)\).
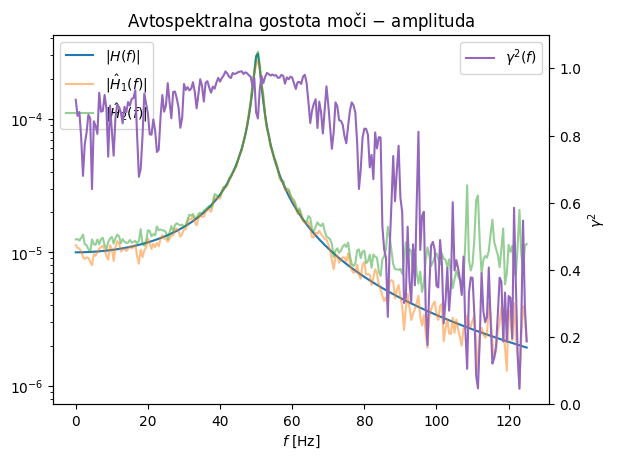
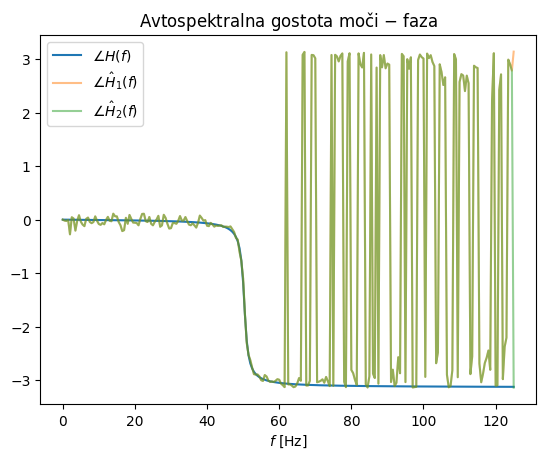
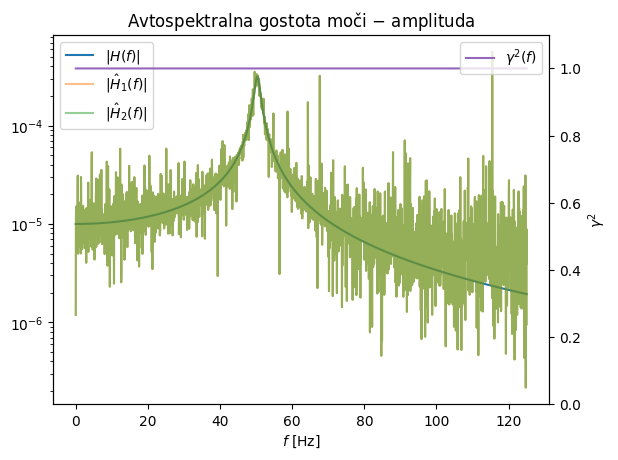
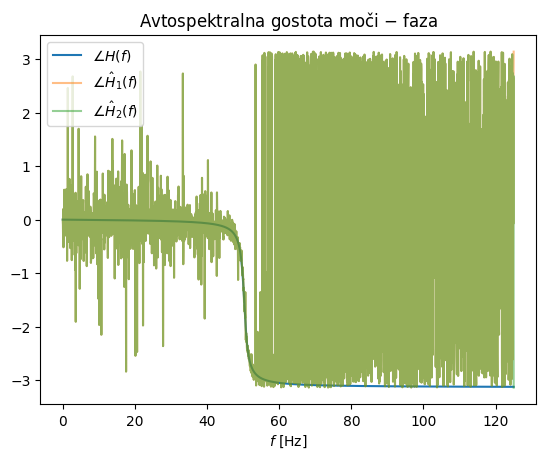
Zgled 1#
V zgledu spodaj si lahko pogledamo uporabo cenilk \(H_1\) in \(H_2\) za oceno frekvenčne prenosne funkcije.
Zgled 2#
Nadaljujemo z zgledom in dodamo povprečenje po odsekih; s tem zmanjšamo frekvenčno natančnost in tudi raztros cenilke frekvenčne prenosne funkcije.